“神思智飛”:無需飛手的無人機AI操控新范式

長按識別二維碼閱讀精彩內容






“神思智飛”:無需飛手的無人機AI操控新范式

近日,第九屆世界無人機大會在深圳舉辦,“神思智飛”在大會震撼亮相。展會現場,多位專業無人機飛手與“神思智飛”展開精彩對決,“神思智飛”順利完成比賽,專業選手均未能完成挑戰任務,吸引了諸多國內及外籍專家駐足垂詢。神思智飛是基于“云邊協同與智能控制”的耦合理念打造的下一代具身智能操作系統,由邊緣端AIU(邊緣計算模組)與云端智能中樞雙核驅動。在邊緣側,賦予硬件設備“感知-決策-行動”的閉環智慧能力,在中心側,實現全域資源的最優調度,構建從單體智能到群體智能的全維生態。
創新AI破解行業痛點
針對我國低空智能無人系統存在多模態感知魯棒性差、邊緣端決策延遲高、集群協同效率低等產業痛點,聚焦復雜環境感知、智能決策引擎、群體協同控制等關鍵方向,濟南能源集團所屬神思電子攻克多傳感器異構數據動態融合、輕量化大模型實時推理、多智能體博弈式任務分配等核心技術,創新打造“神思智飛”。
空中智能體搭載的神思智飛算力單元以“智測、智算、智飛、智管”為核心理念,集成高算力AI處理模塊及自組網通信模塊,構建大算力、低功耗、輕量化、軟硬一體無人機飛行大腦。神思智飛通過AI算法自由選配、多模態數據融合、自主規劃、自主決策等能力,實現無人機智能化、自主化飛行。
動態目標追蹤
神思智飛具備動態目標識別、精準定位、目標追蹤、路徑預測及路徑規劃等算法,可自動識別可疑目標,對特征目標進行精確定位,自動鎖定目標進行實時追蹤。通過預測動態目標行進路徑,實時規劃追蹤路徑,并進行追蹤路徑優化,確保緊跟目標。
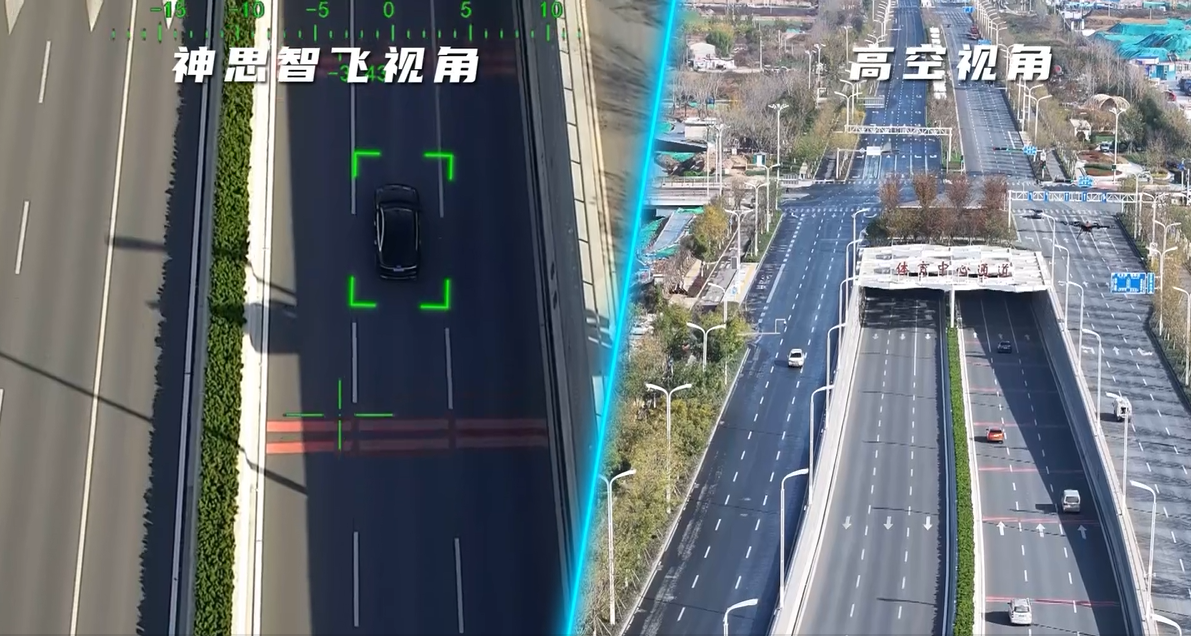
比如在動態目標追蹤場景中,神思智飛可以實現精準識別、緊密追蹤:當目標車輛進入樹木遮擋區域躲避追蹤,無人機俯瞰全局,將車輛行蹤一覽無余;當目標車輛混跡車海,有同向不同速、相向匯聚、轉彎變線等情況,無人機均能從容應對,精準預判、絲滑追蹤。通過特征、速度、軌跡、方向等四維時空比對,抗干擾鎖定,穩定追蹤。
智能決策飛行

神思智飛支持結合AI分析結果,多模態數據融合分析判斷,生成決策方案及飛行指令,可以根據不同智算結果,自主規劃最優路徑,自主飛行執行任務。支持無人機超視距自主飛行,機對機編隊接力,實時透傳跟蹤數據,接力追蹤。
比如在追蹤場景中,主力機鎖定目標車輛追蹤,自主計算地理圍欄,當接近空域邊界時,即刻向周邊無人機發出緊急接力信號。協作機即刻規劃最佳路徑,全力奔赴目標區域,接近目標后,降速廣域搜索,10秒內即可成功鎖定目標車輛并進入追蹤模式,完成交接。
集群協同配合
神思智飛采用自組網技術及集群協同控制模型,集成自組網模塊或衛星通信模塊,實現無人機之間的信息傳輸與協同,保障通信的連續性和穩定性。同時,支持在弱網及斷網環境下,無人機集群自主組網、局域互通、共享視野及數據,智能決策、協同配合。
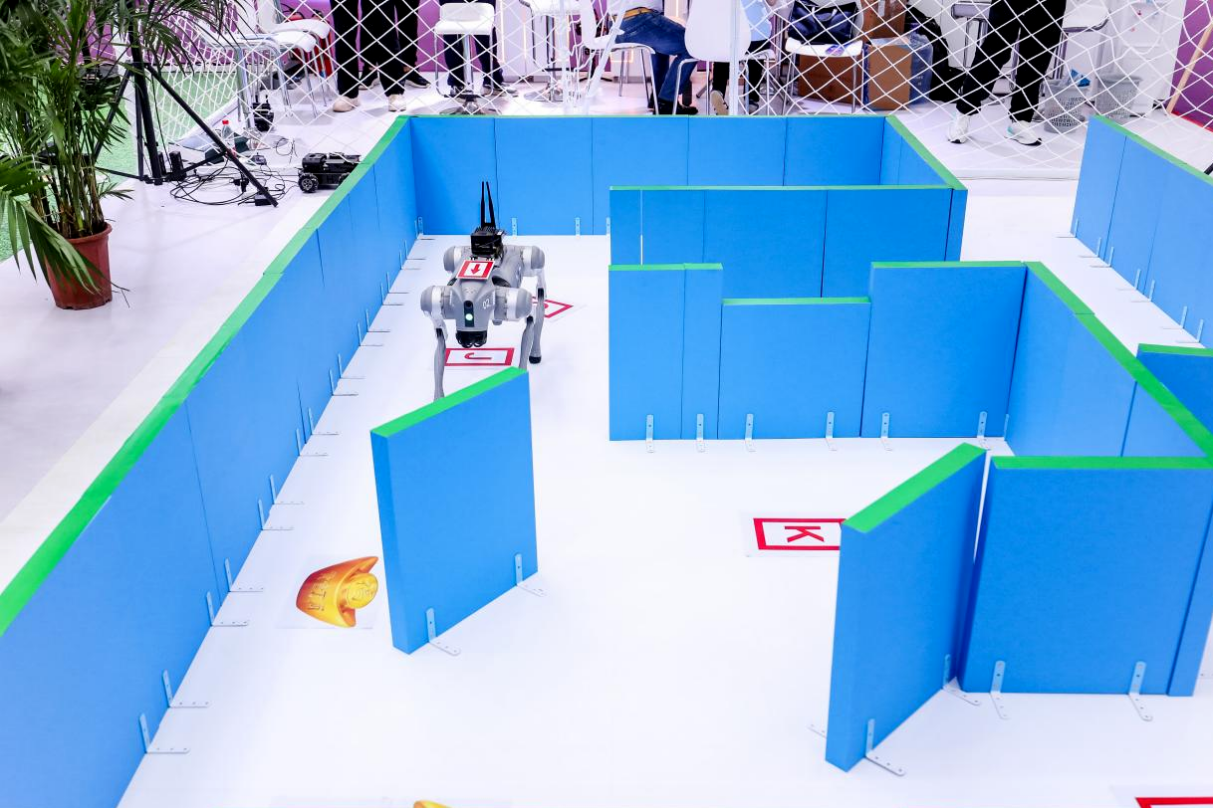
比如在空地協同應用場景,無人機可以用上帝視角,指揮機器狗穿越復雜地形,并躲避狹窄區域,無人機實時追蹤定位機器狗的位置,并發出下一步指令。若發現地形改變,將重新構圖并生成路線,在無人機的指揮下機器狗成功完成任務。
超異構分布式架構
神思智飛邊緣端采用存算一體設計的AIU單元,支持100TOPS的GPU算力和多種通信模式無縫切換。云端智能中樞集成大模型技術,指揮員可以用白話下達指令,大模型即刻理解需求意圖,同時拆解為多個可執行子任務并下發,調集相關智能體參與執行。
構建“感知-決策-指揮-行動”四維認知鏈,通過異構傳感器陣列實現全維度融合感知,邊緣端的大算力支持實時決策并指揮其他智能體完成任務,同時控制自身與之協同。

目前,神思智飛已成功應用于交通流量監測、森林防火、能源管線巡檢等多個典型場景。在交通流量監測場景中,可自動識別不同路段交通密度與異常情況,生成可視化報告輔助城市交通管理。在森林防火場景中,實現高空實時火情監測與疑似煙火源識別預警,為森林防滅火提供數字化安全防線。在能源安全巡檢場景中,實現全天候、廣覆蓋、無人值守下對能源管線及建筑工地全面監控和異常監測。
“神思智飛”:無需飛手的無人機AI操控新范式
長按識別二維碼閱讀精彩內容

聯系我們
 魯ICP備2020037509號
掃二維碼關注公眾號
魯ICP備2020037509號
掃二維碼關注公眾號
